Nutty Motion Filter
When working with animation - be it virtual or robotic, character- or object-wise, we commonly run into the need for interpolation techniques. Choosing your techniques depends on the definition of your problem, as in:
- Does it run in realtime or offline?
- Do you need to blend between animations, or poses or both?
- Is it a one-time runner, or do you continuously want to keep driving the motion towards a target?
All these questions apply especially when you are working with procedural animation, i.e., one that is generated on-the-fly based on given parameters, which may be changing over time.
In that case you typically need it to run in realtime, and the motion can either be continuously generated from a mathematical formulation (e.g. sine-waves), algorithmic formulation (e.g. inverse kinematics) or to be the result of mixing pre-designed static poses and animations that should elegantly blend and transition together.
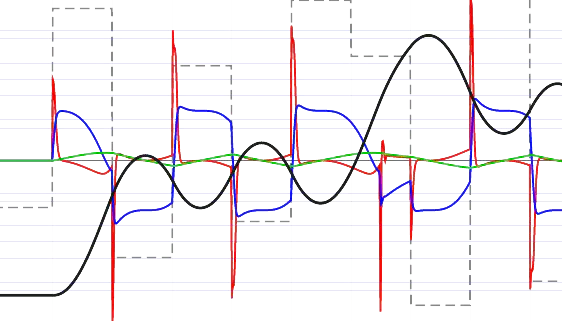
The Nutty Motion Filter1 (NMF) was created to work as a motion interpolation method that is especially directed at such procedural animation applications. It can be applied anywhere in a motion generation pipeline (typically at the end) to a discrete and non-continuous motion signal driver, and outputs a C0, C1 or C2 continuous motion signal as a result, depending on the order of the filter that is used.
Online Demo
Tiago Ribeiro
AI Technology & Product Consulting
Eclectic scientist and engineer striving to breathe the Illusion of Life into autonomous characters